 |
 |
 |
 |
 |
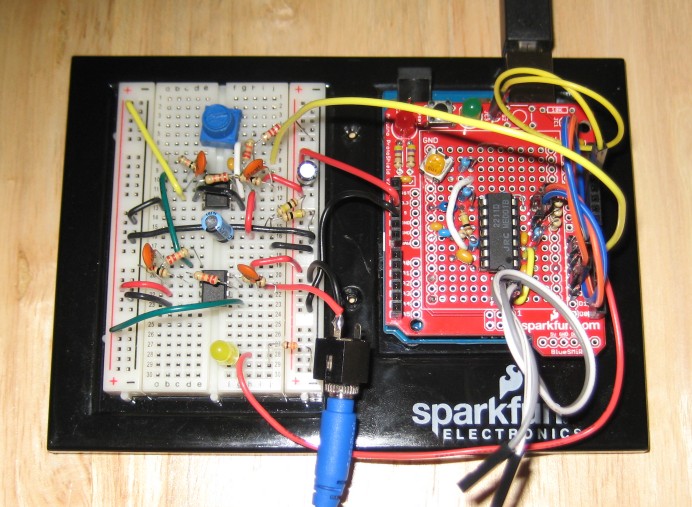
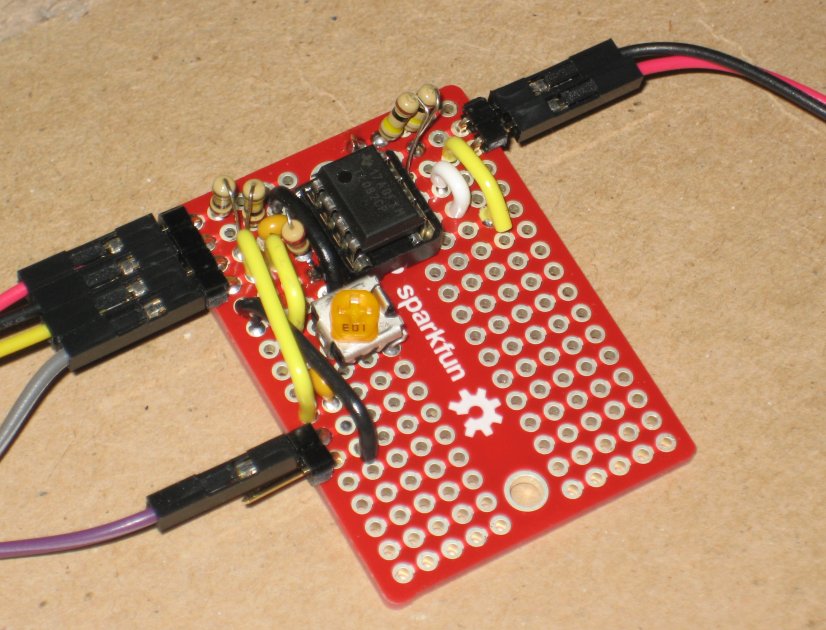
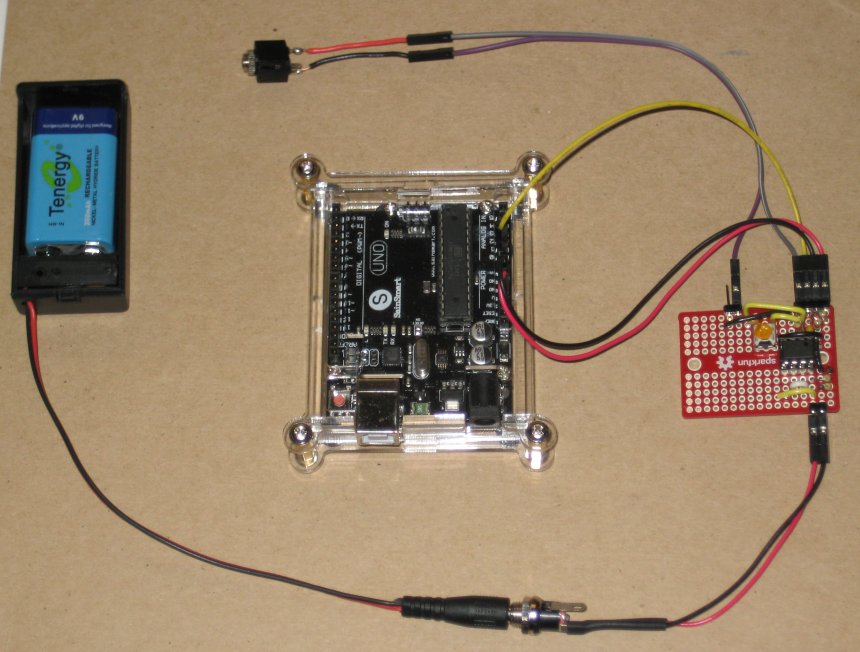
Solderable Breadboard |
 |
with SainSmart UNO |
 |
 |
 |
 |
 |
 |
 |
 |
RTTY Modem Downloads (Click Here) The source is being released under the GPL version 3, which is also available on the download page. |
|
Links Arduino - Open-source hardware and embedded development tools. SparkFun - Supplier for Arduino boards and hardware. AdaFruit - Another good source for Arduino hardware. |