 | |
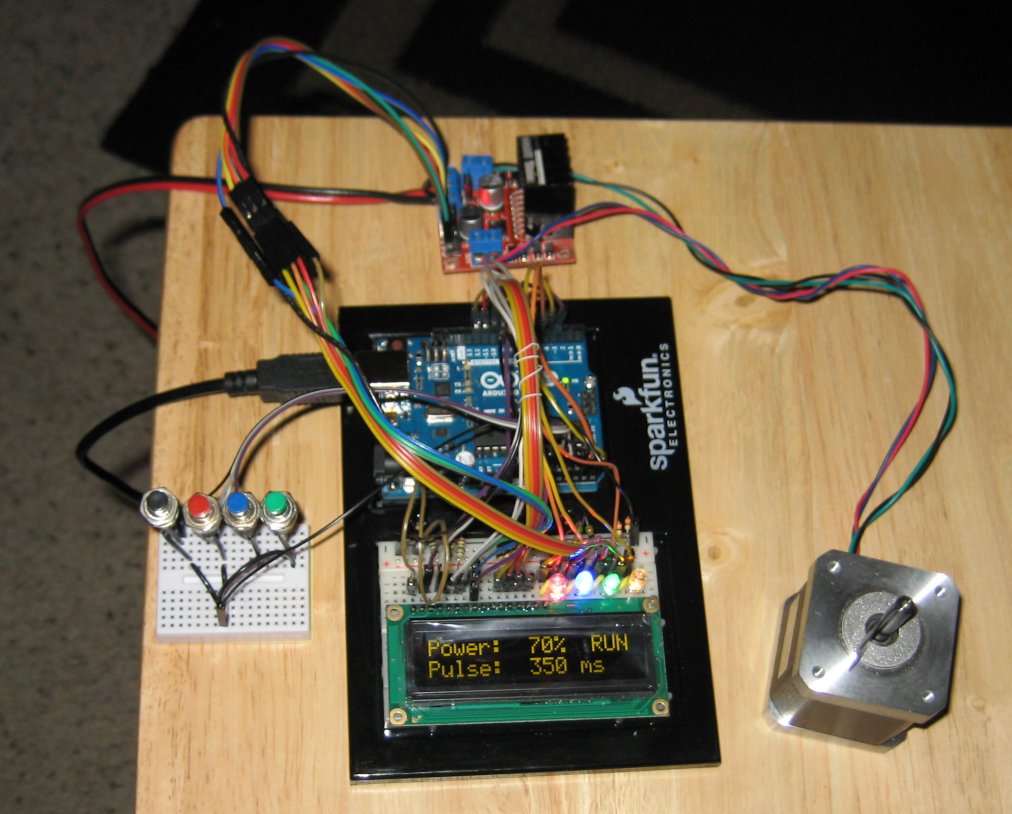
| Figure 1: Complete Kit | |
 | |
| Figure 2: Operation Selected | |
 | |
| Figure 3: Motor Running | |
 | |
| Figure 4: Modify Setting | |
|
Links Arduino - Open-source hardware and embedded development tools. SparkFun - Good source for Arduino and robotics hardware. AdaFruit - Another good source for Arduino hardware. |
|